Loading docs/graph/flow/max-flow.md +254 −2 Original line number Diff line number Diff line ## 网络 网络是指一个有向图 $G=(V,E)$ 每条边 $(u,v)\in E$ 都有一个权值 $c(u,v)$,称之为容量(Capacity),当 $(u,v)\notin E$ 时有 $c(u,v)=0$. 其中有两个特殊的点:源点 $s\in V$ 和汇点 $t\in V,(s\neq t)$. ## 流 设 $f(u,v)$ 定义在二元组 $(u\in V,v\in V)$ 上的实数函数且满足 1. **容量限制**:$f(u,v)\leq c(u,v)$ 2. **斜对称性**:$f(u,v)=-f(v,u)$ 3. **流守恒性**:$\forall x\in V-\{s,t\},\sum_{(u,x)\in E}f(u,x)=\sum_{(x,v)\in E}f(x,v)$ 那么 $f$ 称为网络 $G$ 的流函数 对于 $(u,v)\in E$,$f(u,v)$ 称为边的**流量**,$c(u,v)-f(u,v)$ 称为边的**剩余容量** 整个网络的流量为 $\sum_{(s,v)\in E}f(s,v)$,即**从源点发出的所有流量之和** *注*:流函数的完整定义为 $$ f(u,v)=\left\{\begin{split} &f(u,v)&,(u,v)\in E\\ &-f(v,u)&,(v,u)\in E\\ &0&,(u,v)\notin E,(v,u)\notin E \end{split}\right. $$ ## 定义 我们有一张图,要求从源点流向汇点的最大流量(可以有很多条路到达汇点),就是我们的最大流问题。 求解最大流问题有三种常见算法:Edmonds-Karp 算法,Dinic 算法,ISAP 算法。 ## 最大流主流的两种方法 ### Ford-Fulkerson 方法 ## 增广路 该方法通过寻找增广路来更新最大流 有 $EK,dinic,SAP,ISAP$ 主流算法 ### Push-Relabel 方法 该方法在求解过程中忽略流守恒性,并每次对一个结点更新信息,以求解最大流 有 $HLPP$ 的主流算法 ## FF增广路算法 求解最大流之前,我们先认识以下增广路的概念。 Loading Loading @@ -202,3 +245,212 @@ int main() { ### ISAP 这个是 SAP 算法的加强版 (Improved)。 ## PR预留推进算法 推送 - 重贴标签算法通过对单个结点的更新操作,直到没有结点需要更新来求解最大流 算法过程维护的流函数不一定保持流守恒性,对于一个结点,我们允许进入结点的流超过流出结点的流,超过的部分被称为结点 $u(u\in V-\{s,t\})$ 的**超额流**$e(u)$: $$ e(u)=\sum_{(x,u)\in E}f(x,u)-\sum_{(u,y)\in E}f(u,y) $$ 若 $e(u)>0$,称结点 $u$**溢出**. 推送 - 重贴标签算法维护每个结点的高度 $h(u)$,并且规定溢出的结点 $u$ 如果要推送超额流,只能向高度小于 $u$ 的结点推送;如果 $u$ 没有相邻的高度小于 $u$ 的结点,就修改 $u$ 的高度(重贴标签). #### 高度函数 准确地说,推送 - 重贴标签维护以下的一个映射 $h:V\to \mathbb{N}$: - $h(s)=|V|,h(t)=0$ - $\forall (u,v)\in E_f,h(u)\leq h(v)+1$. 则称 $h$ 是残存网络 $G_f=(V_f,E_f)$ 的高度函数。 引理 1:设 $G_f$ 上的高度函数为 $h$,对于任意两个结点 $u,v\in V$,如果 $h(u)>h(v)+1$,则 $(u,v)$ 不是 $G_f$ 中的边。 算法只会在 $h(u)=h(v)+1$ 的边执行推送。 #### 推送 -Push 适用条件:结点 $u$ 溢出,且存在结点 $v((u,v)\in V_f,c(u,v)-f(u,v)>0,h(u)=h(v)+1)$,则 push 操作适用于 $(u,v)$. 于是,我们尽可能将超额流从 $u$ 推送到 $v$,推送过程中我们只关心超额流和 $c(u,v)-f(u,v)$ 的最小值,不关心 $v$ 是否溢出。 如果 $(u,v)$ 在推送完之后满流,将其从残存网络中删除 #### 重贴标签 -Relabel 适用条件:如果结点 $u$ 溢出,且 $\forall (u,v)\in E_f,h(u)\leq h(v)$,则 relabel 操作适用于 $u$. 则将 $h(u)$ 更新为 $min_{(u,v)\in E_f}h(v)+1$ 即可。 #### 初始化 $$ \begin{split} &\forall (u,v)\in E,&f(u,v)=\left\{\begin{split} &c(u,v)&,u=s\\ &0&,u\neq s\\ \end{split}\right.. \\ &\forall u\in V,&h(u)=\left\{\begin{split} &|V|&,u=s\\ &0&,u\neq s\\ \end{split}\right. ,e(u)=\sum_{(x,u)\in E}f(x,u)-\sum_{(u,y)\in E}f(u,y). \end{split}. $$ 上述将 $(s,v)\in E$ 充满流,并将 $h(s)$ 抬高,使得 $(s,v)\notin E_f$,因为 $h(s)>h(v)$,而且 $(s,v)$ 毕竟满流,没必要留在残存网络中;上述还将 $e(s)$ 初始化为 $\sum_{(s,v)\in E}f(s,v)$ 的相反数。 #### 通用执行框架 无需按照特定顺序,执行以下过程: - 只要存在结点 $u$ 满足 push 或 relabel 的条件,就执行对应的操作。 如图,每个结点中间表示编号,左下表示高度值 $h(u)$,右下表示超额流 $e(u)$,结点颜色的深度也表示结点的高度;边权表示 $c(u,v)-f(u,v)$,绿色的边表示满足 $h(u)=h(v)+1$ 的边 $(u,v)$(即残存网络的边 $E_f$): 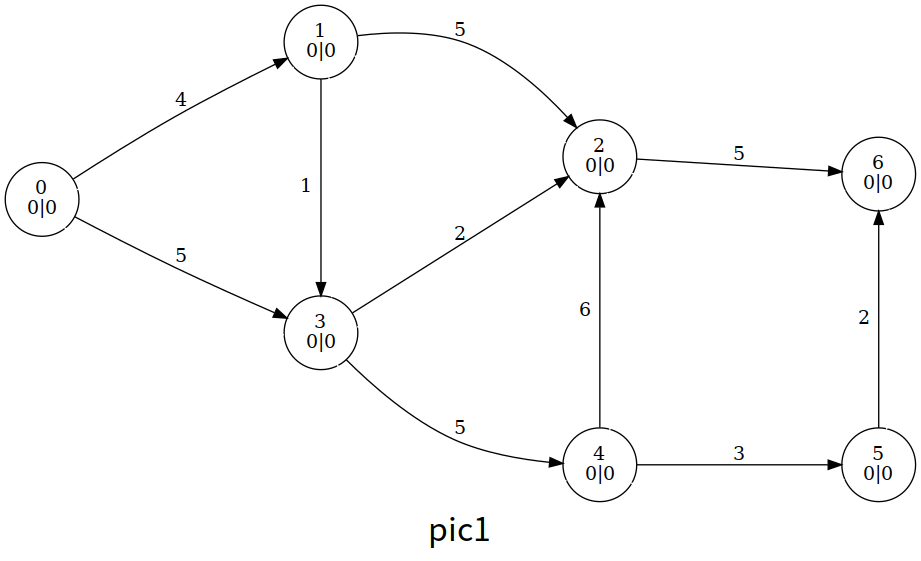 整个算法我们大致浏览一下过程,这里笔者使用的是一个暴力算法,即暴力扫描是否有溢出的结点,有就更新  最后的结果 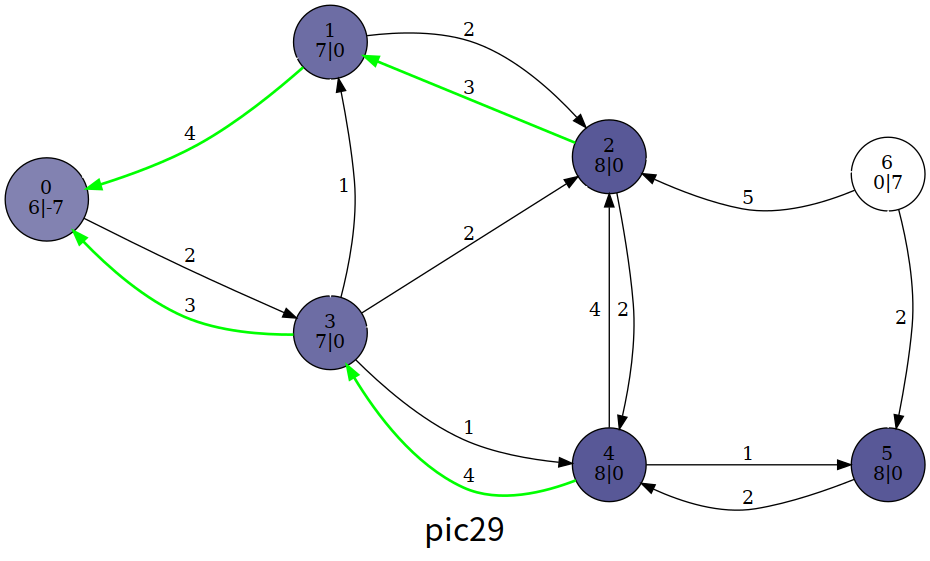 可以发现,最后的超额流一部分回到了 $s$,且除了源点汇点,其他结点都没有溢出;这时的流函数 $f$ 满足流守恒性,为最大流,即 $e(t)$. #### 核心代码 ```cpp const int N=1e4+4,M=1e5+5,INF=0x3f3f3f3f; int n,m,s,t,maxflow,tot; int ht[N],ex[N]; void init(){// 初始化 for(int i=h[s];i;i=e[i].nex){const int &v=e[i].t; ex[v]=e[i].v,ex[s]-=ex[v],e[i^1].v=e[i].v,e[i].v=0; } ht[s]=n; } bool push(int ed){const int &u=e[ed^1].t,&v=e[ed].t; int flow=min(ex[u],e[ed].v); ex[u]-=flow,ex[v]+=flow,e[ed].v-=flow,e[ed^1].v+=flow; return ex[u];// 如果 u 仍溢出,返回 1 } void relabel(int u){ ht[u]=INF; for(int i=h[u];i;i=e[i].nex)if(e[i].v)ht[u]=min(ht[u],ht[e[i].t]); ++ht[u]; } ``` ### HLPP 算法 最高标号预流推进算法(High Level Preflow Push)是基于推送 - 重贴标签算法的优先队列实现,该算法优先推送高度高的溢出的结点,算法算法复杂度 $O(n^2\sqrt m)$. 具体地说,HLPP 维护以下过程: 1. 初始化(基于推送 - 重贴标签算法) 2. 选择溢出结点(除 $s,t$)中高度最高的结点 $u$,并对它所有可以推送的边进行推送; 3. 如果 $u$ 仍溢出,对它重贴标签,回到 2. 4. 如果没有溢出的结点,算法结束 #### BFS 优化 HLPP 的上界为 $O(n^2\sqrt m)$,但在使用时卡得比较紧;我们可以在初始化高度的时候进行优化 具体来说,我们初始化 $h(u)$ 为 $u$ 到 $t$ 的最短距离;特别地,$h(s)=n$. 在 BFS 的同时我们顺便检查图的联通性,排除无解的情况 #### GAP 优化 HLPP 推送的条件是 $h(u)=h(v)+1$,而如果在算法的某一时刻,$h(u)=t$ 的结点个数为 0,那么对于 $h(u)>t$ 的结点就永远无法推送超额流到 $t$,因此只能送回 $s$,那么我们就在这时直接让他们的高度变成 $n+1$,以尽快推送回 $s$,减少重贴标签的操作 #### [LuoguP4722] 【模板】最大流 加强版 / 预流推进 ```cpp #include<cstdio> #include<cstring> #include<queue> using namespace std; const int N=1e4+4,M=2e5+5,INF=0x3f3f3f3f; int n,m,s,t; struct qxx{int nex,t,v;}; qxx e[M*2]; int h[N],cnt=1; void add_path(int f,int t,int v){e[++cnt]=(qxx){h[f],t,v},h[f]=cnt;} void add_flow(int f,int t,int v){add_path(f,t,v);add_path(t,f,0);} int ht[N],ex[N],gap[N];// 高度;超额流;gap 优化 bool bfs_init(){ memset(ht,0x3f,sizeof(ht)); queue<int> q; q.push(t),ht[t]=0; while(q.size()){// 反向 BFS, 遇到没有访问过的结点就入队 int u=q.front();q.pop(); for(int i=h[u];i;i=e[i].nex){const int &v=e[i].t; if(e[i^1].v&&ht[v]>ht[u]+1)ht[v]=ht[u]+1,q.push(v); } } return ht[s]!=INF;// 如果图不连通,返回 0 } struct cmp{bool operator()(int a,int b)const{return ht[a]<ht[b];}};// 伪装排序函数 priority_queue<int,vector<int>,cmp> pq;// 将需要推送的结点以高度高的优先 bool vis[N];// 是否在优先队列中 int push(int u){// 尽可能通过能够推送的边推送超额流 for(int i=h[u];i;i=e[i].nex){const int &v=e[i].t,&w=e[i].v; if(!w||ht[u]!=ht[v]+1)continue; int k=min(w,ex[u]);// 取到剩余容量和超额流的最小值 ex[u]-=k,ex[v]+=k,e[i].v-=k,e[i^1].v+=k;//push if(v!=s&&v!=t&&!vis[v])pq.push(v),vis[v]=1;// 推送之后,v 必然溢出,则入堆,等待被推送 if(!ex[u])return 0;// 如果已经推送完就返回 }return 1; } void relabel(int u){// 重贴标签(高度) ht[u]=INF; for(int i=h[u];i;i=e[i].nex)if(e[i].v)ht[u]=min(ht[u],ht[e[i].t]); ++ht[u]; } int hlpp(){// 返回最大流 if(!bfs_init())return 0;// 图不连通 ht[s]=n; memset(gap,0,sizeof(gap)); for(int i=1;i<=n;i++)if(ht[i]!=INF)gap[ht[i]]++;// 初始化 gap for(int i=h[s];i;i=e[i].nex){const int v=e[i].t,w=e[i].v;// 队列初始化 if(!w)continue; ex[s]-=w,ex[v]+=w,e[i].v-=w,e[i^1].v+=w;// 注意取消 w 的引用 if(v!=s&&v!=t&&!vis[v])pq.push(v),vis[v]=1;// 入队 } while(pq.size()){ int u=pq.top();pq.pop(),vis[u]=0; while(push(u)){// 仍然溢出 // 如果 u 结点原来所在的高度没有结点了,相当于出现断层 if(!--gap[ht[u]])for(int i=1;i<=n;i++) if(i!=s&&i!=t&&ht[i]>ht[u]&&ht[i]<n+1)ht[i]=n+1; relabel(u);++gap[ht[u]];// 新的高度,更新 gap } } return ex[t]; } int main(){ scanf("%d%d%d%d",&n,&m,&s,&t); for(int i=1,u,v,w;i<=m;i++){ scanf("%d%d%d",&u,&v,&w); add_flow(u,v,w); } printf("%d",hlpp()); return 0; } ``` 感受一下运行过程 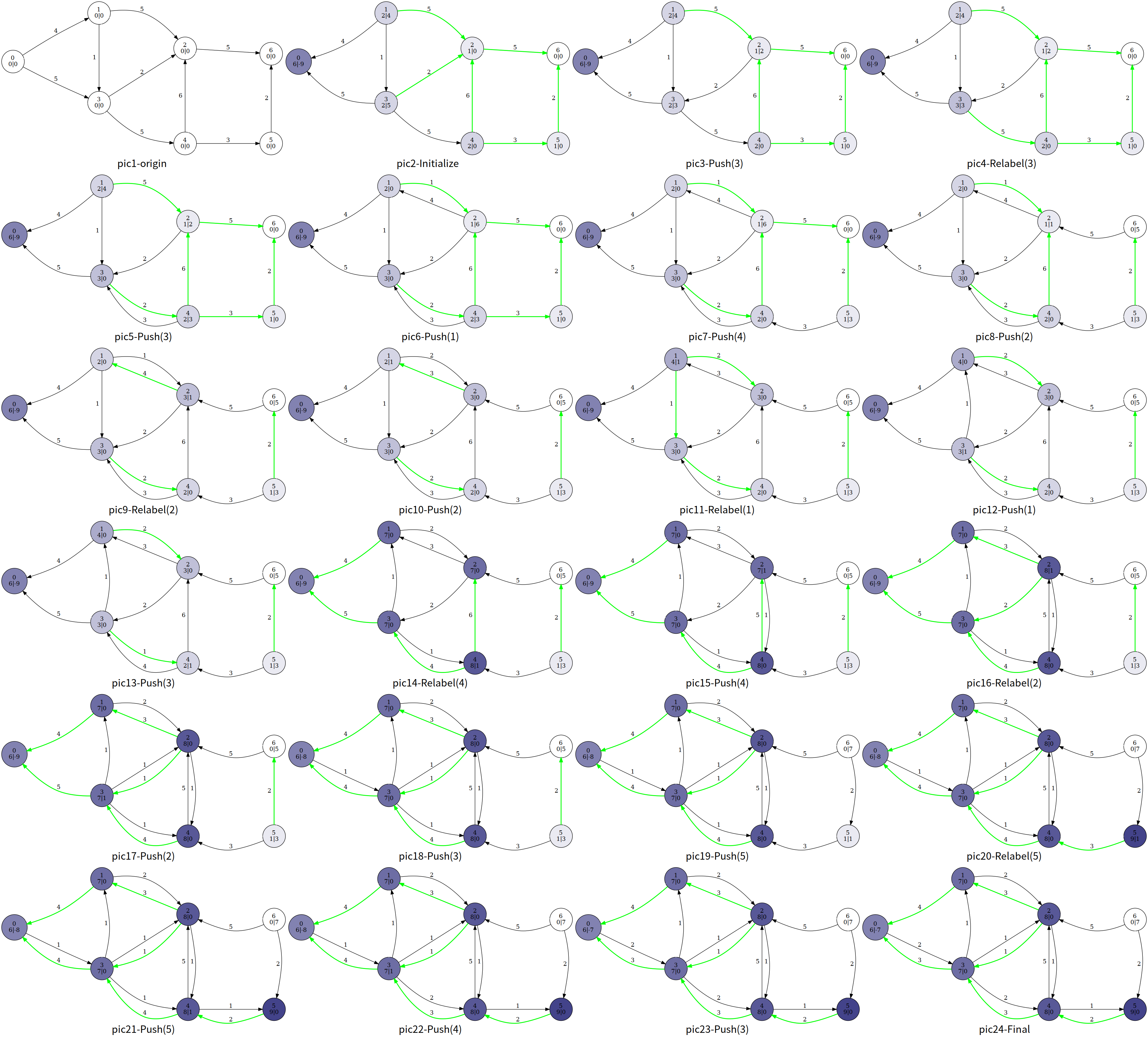 其中 $pic13$ 到 $pic14$ 执行了 $Relabel(4)$,并进行了 GAP 优化 Loading
docs/graph/flow/max-flow.md +254 −2 Original line number Diff line number Diff line ## 网络 网络是指一个有向图 $G=(V,E)$ 每条边 $(u,v)\in E$ 都有一个权值 $c(u,v)$,称之为容量(Capacity),当 $(u,v)\notin E$ 时有 $c(u,v)=0$. 其中有两个特殊的点:源点 $s\in V$ 和汇点 $t\in V,(s\neq t)$. ## 流 设 $f(u,v)$ 定义在二元组 $(u\in V,v\in V)$ 上的实数函数且满足 1. **容量限制**:$f(u,v)\leq c(u,v)$ 2. **斜对称性**:$f(u,v)=-f(v,u)$ 3. **流守恒性**:$\forall x\in V-\{s,t\},\sum_{(u,x)\in E}f(u,x)=\sum_{(x,v)\in E}f(x,v)$ 那么 $f$ 称为网络 $G$ 的流函数 对于 $(u,v)\in E$,$f(u,v)$ 称为边的**流量**,$c(u,v)-f(u,v)$ 称为边的**剩余容量** 整个网络的流量为 $\sum_{(s,v)\in E}f(s,v)$,即**从源点发出的所有流量之和** *注*:流函数的完整定义为 $$ f(u,v)=\left\{\begin{split} &f(u,v)&,(u,v)\in E\\ &-f(v,u)&,(v,u)\in E\\ &0&,(u,v)\notin E,(v,u)\notin E \end{split}\right. $$ ## 定义 我们有一张图,要求从源点流向汇点的最大流量(可以有很多条路到达汇点),就是我们的最大流问题。 求解最大流问题有三种常见算法:Edmonds-Karp 算法,Dinic 算法,ISAP 算法。 ## 最大流主流的两种方法 ### Ford-Fulkerson 方法 ## 增广路 该方法通过寻找增广路来更新最大流 有 $EK,dinic,SAP,ISAP$ 主流算法 ### Push-Relabel 方法 该方法在求解过程中忽略流守恒性,并每次对一个结点更新信息,以求解最大流 有 $HLPP$ 的主流算法 ## FF增广路算法 求解最大流之前,我们先认识以下增广路的概念。 Loading Loading @@ -202,3 +245,212 @@ int main() { ### ISAP 这个是 SAP 算法的加强版 (Improved)。 ## PR预留推进算法 推送 - 重贴标签算法通过对单个结点的更新操作,直到没有结点需要更新来求解最大流 算法过程维护的流函数不一定保持流守恒性,对于一个结点,我们允许进入结点的流超过流出结点的流,超过的部分被称为结点 $u(u\in V-\{s,t\})$ 的**超额流**$e(u)$: $$ e(u)=\sum_{(x,u)\in E}f(x,u)-\sum_{(u,y)\in E}f(u,y) $$ 若 $e(u)>0$,称结点 $u$**溢出**. 推送 - 重贴标签算法维护每个结点的高度 $h(u)$,并且规定溢出的结点 $u$ 如果要推送超额流,只能向高度小于 $u$ 的结点推送;如果 $u$ 没有相邻的高度小于 $u$ 的结点,就修改 $u$ 的高度(重贴标签). #### 高度函数 准确地说,推送 - 重贴标签维护以下的一个映射 $h:V\to \mathbb{N}$: - $h(s)=|V|,h(t)=0$ - $\forall (u,v)\in E_f,h(u)\leq h(v)+1$. 则称 $h$ 是残存网络 $G_f=(V_f,E_f)$ 的高度函数。 引理 1:设 $G_f$ 上的高度函数为 $h$,对于任意两个结点 $u,v\in V$,如果 $h(u)>h(v)+1$,则 $(u,v)$ 不是 $G_f$ 中的边。 算法只会在 $h(u)=h(v)+1$ 的边执行推送。 #### 推送 -Push 适用条件:结点 $u$ 溢出,且存在结点 $v((u,v)\in V_f,c(u,v)-f(u,v)>0,h(u)=h(v)+1)$,则 push 操作适用于 $(u,v)$. 于是,我们尽可能将超额流从 $u$ 推送到 $v$,推送过程中我们只关心超额流和 $c(u,v)-f(u,v)$ 的最小值,不关心 $v$ 是否溢出。 如果 $(u,v)$ 在推送完之后满流,将其从残存网络中删除 #### 重贴标签 -Relabel 适用条件:如果结点 $u$ 溢出,且 $\forall (u,v)\in E_f,h(u)\leq h(v)$,则 relabel 操作适用于 $u$. 则将 $h(u)$ 更新为 $min_{(u,v)\in E_f}h(v)+1$ 即可。 #### 初始化 $$ \begin{split} &\forall (u,v)\in E,&f(u,v)=\left\{\begin{split} &c(u,v)&,u=s\\ &0&,u\neq s\\ \end{split}\right.. \\ &\forall u\in V,&h(u)=\left\{\begin{split} &|V|&,u=s\\ &0&,u\neq s\\ \end{split}\right. ,e(u)=\sum_{(x,u)\in E}f(x,u)-\sum_{(u,y)\in E}f(u,y). \end{split}. $$ 上述将 $(s,v)\in E$ 充满流,并将 $h(s)$ 抬高,使得 $(s,v)\notin E_f$,因为 $h(s)>h(v)$,而且 $(s,v)$ 毕竟满流,没必要留在残存网络中;上述还将 $e(s)$ 初始化为 $\sum_{(s,v)\in E}f(s,v)$ 的相反数。 #### 通用执行框架 无需按照特定顺序,执行以下过程: - 只要存在结点 $u$ 满足 push 或 relabel 的条件,就执行对应的操作。 如图,每个结点中间表示编号,左下表示高度值 $h(u)$,右下表示超额流 $e(u)$,结点颜色的深度也表示结点的高度;边权表示 $c(u,v)-f(u,v)$,绿色的边表示满足 $h(u)=h(v)+1$ 的边 $(u,v)$(即残存网络的边 $E_f$):  整个算法我们大致浏览一下过程,这里笔者使用的是一个暴力算法,即暴力扫描是否有溢出的结点,有就更新  最后的结果  可以发现,最后的超额流一部分回到了 $s$,且除了源点汇点,其他结点都没有溢出;这时的流函数 $f$ 满足流守恒性,为最大流,即 $e(t)$. #### 核心代码 ```cpp const int N=1e4+4,M=1e5+5,INF=0x3f3f3f3f; int n,m,s,t,maxflow,tot; int ht[N],ex[N]; void init(){// 初始化 for(int i=h[s];i;i=e[i].nex){const int &v=e[i].t; ex[v]=e[i].v,ex[s]-=ex[v],e[i^1].v=e[i].v,e[i].v=0; } ht[s]=n; } bool push(int ed){const int &u=e[ed^1].t,&v=e[ed].t; int flow=min(ex[u],e[ed].v); ex[u]-=flow,ex[v]+=flow,e[ed].v-=flow,e[ed^1].v+=flow; return ex[u];// 如果 u 仍溢出,返回 1 } void relabel(int u){ ht[u]=INF; for(int i=h[u];i;i=e[i].nex)if(e[i].v)ht[u]=min(ht[u],ht[e[i].t]); ++ht[u]; } ``` ### HLPP 算法 最高标号预流推进算法(High Level Preflow Push)是基于推送 - 重贴标签算法的优先队列实现,该算法优先推送高度高的溢出的结点,算法算法复杂度 $O(n^2\sqrt m)$. 具体地说,HLPP 维护以下过程: 1. 初始化(基于推送 - 重贴标签算法) 2. 选择溢出结点(除 $s,t$)中高度最高的结点 $u$,并对它所有可以推送的边进行推送; 3. 如果 $u$ 仍溢出,对它重贴标签,回到 2. 4. 如果没有溢出的结点,算法结束 #### BFS 优化 HLPP 的上界为 $O(n^2\sqrt m)$,但在使用时卡得比较紧;我们可以在初始化高度的时候进行优化 具体来说,我们初始化 $h(u)$ 为 $u$ 到 $t$ 的最短距离;特别地,$h(s)=n$. 在 BFS 的同时我们顺便检查图的联通性,排除无解的情况 #### GAP 优化 HLPP 推送的条件是 $h(u)=h(v)+1$,而如果在算法的某一时刻,$h(u)=t$ 的结点个数为 0,那么对于 $h(u)>t$ 的结点就永远无法推送超额流到 $t$,因此只能送回 $s$,那么我们就在这时直接让他们的高度变成 $n+1$,以尽快推送回 $s$,减少重贴标签的操作 #### [LuoguP4722] 【模板】最大流 加强版 / 预流推进 ```cpp #include<cstdio> #include<cstring> #include<queue> using namespace std; const int N=1e4+4,M=2e5+5,INF=0x3f3f3f3f; int n,m,s,t; struct qxx{int nex,t,v;}; qxx e[M*2]; int h[N],cnt=1; void add_path(int f,int t,int v){e[++cnt]=(qxx){h[f],t,v},h[f]=cnt;} void add_flow(int f,int t,int v){add_path(f,t,v);add_path(t,f,0);} int ht[N],ex[N],gap[N];// 高度;超额流;gap 优化 bool bfs_init(){ memset(ht,0x3f,sizeof(ht)); queue<int> q; q.push(t),ht[t]=0; while(q.size()){// 反向 BFS, 遇到没有访问过的结点就入队 int u=q.front();q.pop(); for(int i=h[u];i;i=e[i].nex){const int &v=e[i].t; if(e[i^1].v&&ht[v]>ht[u]+1)ht[v]=ht[u]+1,q.push(v); } } return ht[s]!=INF;// 如果图不连通,返回 0 } struct cmp{bool operator()(int a,int b)const{return ht[a]<ht[b];}};// 伪装排序函数 priority_queue<int,vector<int>,cmp> pq;// 将需要推送的结点以高度高的优先 bool vis[N];// 是否在优先队列中 int push(int u){// 尽可能通过能够推送的边推送超额流 for(int i=h[u];i;i=e[i].nex){const int &v=e[i].t,&w=e[i].v; if(!w||ht[u]!=ht[v]+1)continue; int k=min(w,ex[u]);// 取到剩余容量和超额流的最小值 ex[u]-=k,ex[v]+=k,e[i].v-=k,e[i^1].v+=k;//push if(v!=s&&v!=t&&!vis[v])pq.push(v),vis[v]=1;// 推送之后,v 必然溢出,则入堆,等待被推送 if(!ex[u])return 0;// 如果已经推送完就返回 }return 1; } void relabel(int u){// 重贴标签(高度) ht[u]=INF; for(int i=h[u];i;i=e[i].nex)if(e[i].v)ht[u]=min(ht[u],ht[e[i].t]); ++ht[u]; } int hlpp(){// 返回最大流 if(!bfs_init())return 0;// 图不连通 ht[s]=n; memset(gap,0,sizeof(gap)); for(int i=1;i<=n;i++)if(ht[i]!=INF)gap[ht[i]]++;// 初始化 gap for(int i=h[s];i;i=e[i].nex){const int v=e[i].t,w=e[i].v;// 队列初始化 if(!w)continue; ex[s]-=w,ex[v]+=w,e[i].v-=w,e[i^1].v+=w;// 注意取消 w 的引用 if(v!=s&&v!=t&&!vis[v])pq.push(v),vis[v]=1;// 入队 } while(pq.size()){ int u=pq.top();pq.pop(),vis[u]=0; while(push(u)){// 仍然溢出 // 如果 u 结点原来所在的高度没有结点了,相当于出现断层 if(!--gap[ht[u]])for(int i=1;i<=n;i++) if(i!=s&&i!=t&&ht[i]>ht[u]&&ht[i]<n+1)ht[i]=n+1; relabel(u);++gap[ht[u]];// 新的高度,更新 gap } } return ex[t]; } int main(){ scanf("%d%d%d%d",&n,&m,&s,&t); for(int i=1,u,v,w;i<=m;i++){ scanf("%d%d%d",&u,&v,&w); add_flow(u,v,w); } printf("%d",hlpp()); return 0; } ``` 感受一下运行过程  其中 $pic13$ 到 $pic14$ 执行了 $Relabel(4)$,并进行了 GAP 优化